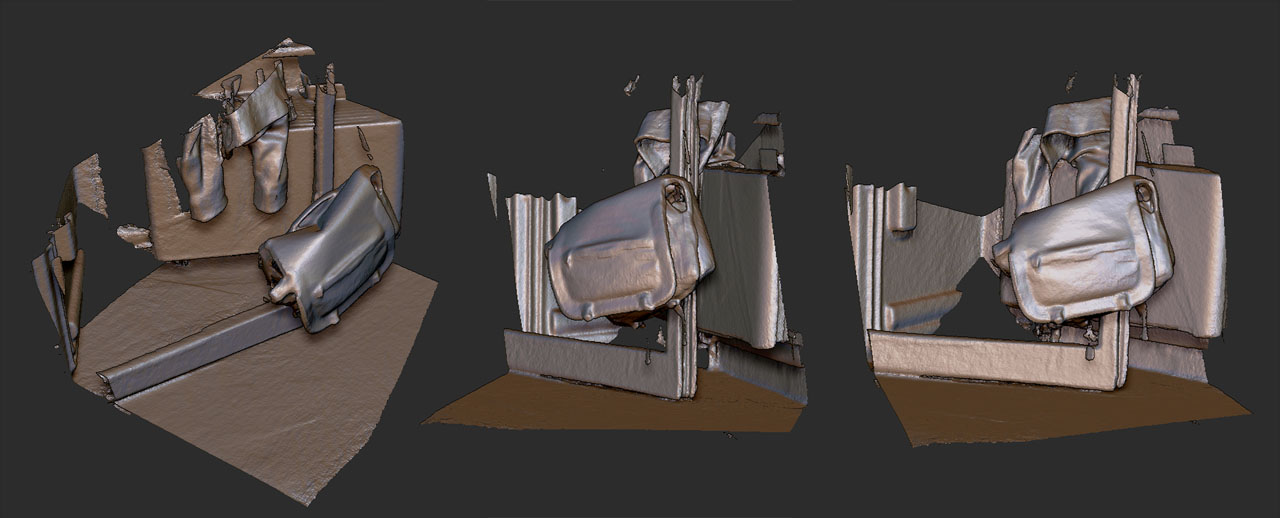
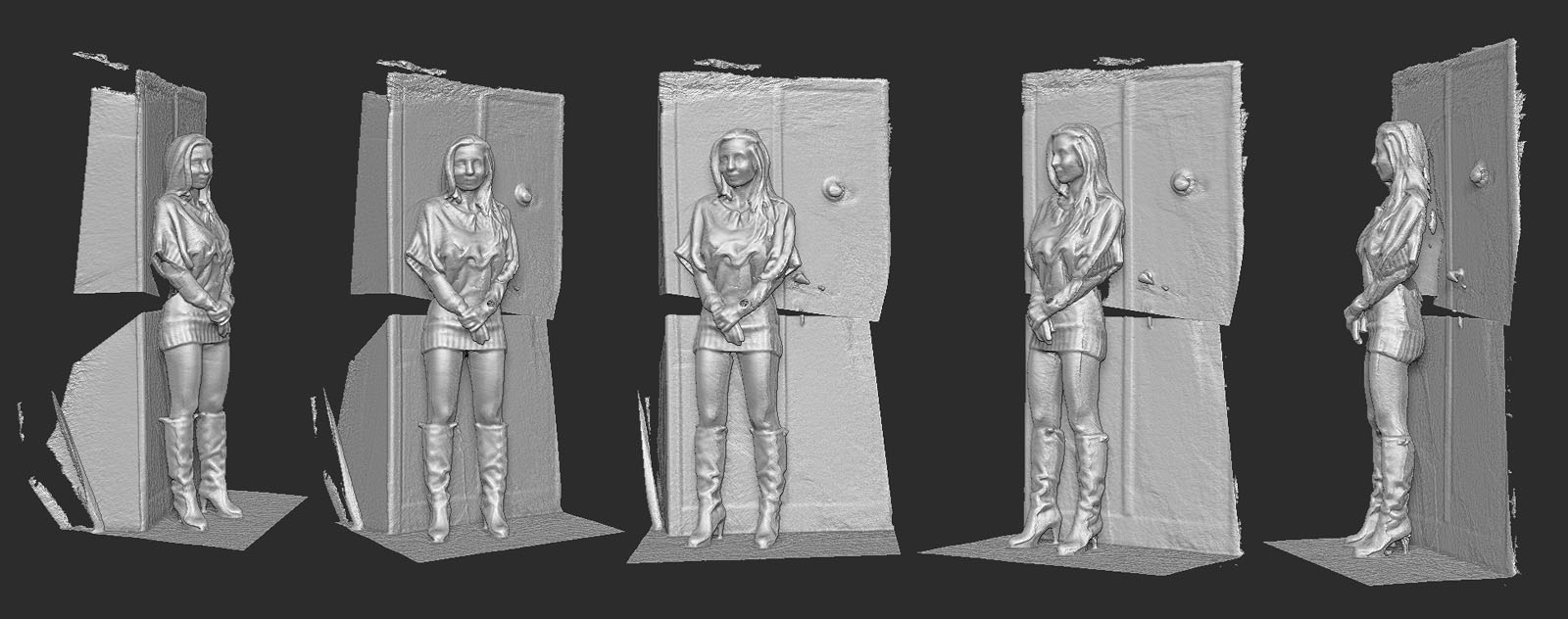
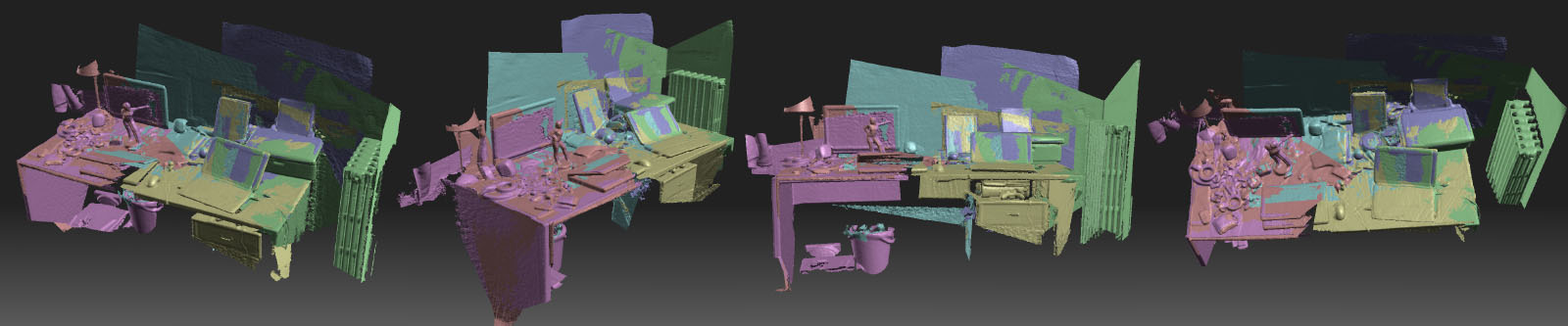
Here’s a list of 3D replications printed by our keen beta testers. Sources are 360° depth streams of team members we posted here. In case you are about to print one of our team members, let me know, so I can update this post.
Derek, one of our enthusiastic users, has taken the time to replicate Martin’s stream using a 3D printer device. There is a write up about the making of on Derek’s blog. Check it out, it’s worth reading!
Here’s is his video capturing the printing sequence
Thanks a lot Derek!
Tony just dropped us a note that he successfully printed Christoph and uploaded the the results to thingiverse. Here is an image of the result

Thanks a lot Tony!
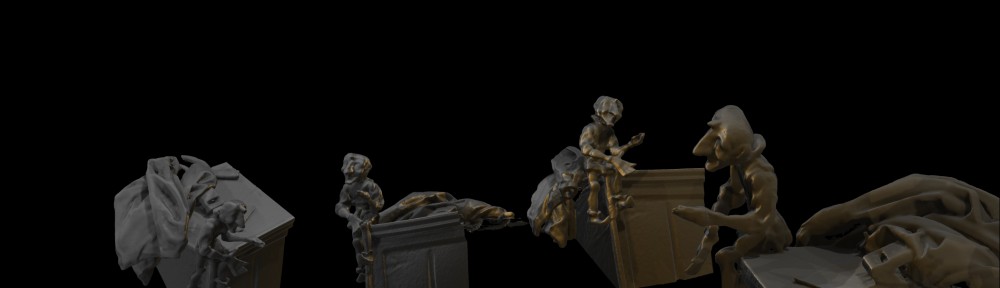
Bruce (3D Printing Systems) replicated all three of. His setup reminds me of bit of Mount Rushmore. Here’s the image

Thanks a lot Bruce!



 This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License.
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License.